
| Начало | |
 |
|
 |
|
| Смотреть | |
|
|
 |
|
| Набор для начинающих | |
|
|
 |
|
| Статьи | |
| Бесплатные программы | |
|
|
 |
|
| Контакты | |
|
|
 |
|
| Обзор программ | |
| Цены на программы | |
| PhotoProjectorEasy (Win 32, Win 64) |
|
| PhotoProjector (Win 32, Win 64) |
|
| PhotoProjectorPlus (Win 32) |
|
| ViewsAligner (Win 32, Win 64) |
|
| Lenticular Photo Processor (Win 32, Win 64) |
|
| MultiStereobase (Win 32) |
|
| Bas-relief (Win 32, Win 64) |
|
| PSD 3D Converter (Win 32, Win 64) |
|
| StereomorpherPlus (Win 32, Win 64) |
|
 |
|
 |
|
Расчет параметров стереоизображений
Параметры просмотра
стереоизображений.
Параметры стереосъемки и их связь
с параметрами просмотра.
Многоракурсное изображение как стабилизатор глубины.
В предлагаемой статье
пойдет речь о различных параметрах, встречающихся при получении и просмотре стереоизображений, т.е. изображений,
представленных только двумя ракурсами,
предназначенными для левого и правого глаза. В первую очередь, нас будет
интересовать связь этих параметров с воспринимаемой
глубиной изображения, а также факторы, ее ограничивающие. Автор
предполагает, что читатель знаком со способами получения и просмотра таких
изображений, а также с основной терминологией.
Параметры
просмотра стереоизображений
Рассмотрим группу
методов просмотра стереоизображений, объединенную по одному признаку:
изображения левого и правого ракурсов формируются в одной плоскости, независимо
от способа представления стереоизображения на бумаге, пленке или экране
монитора. На рисунке схематично показана плоскость изображения; центры зрачков
глаз, удаленные от этой плоскости на дистанцию просмотра L, и друг от друга на межзрачковое расстояние B. В плоскости изображения отмечены две
точки, являющиеся образами одной и той
же объемной точки на левом и правом ракурсах. Расстояние D между ними
называется параллаксом. Если точка, соответствующая правому изображению,
расположена правее, параллакс называется положительным, лучи проведенные от
глаз через соответствующие им точки сходятся за плоскостью изображения на глубине Zp. При обратном
расположении точек возникает отрицательный параллакс и лучи пересекаются на
глубине Zm перед плоскостью
изображения.

Перечисленные
параметры связаны простыми формулами, выведенными из подобия
треугольников:
Zm = D
x L / ( B + D ); Zp = D
x L / ( B – D ). ( 1 )
Естественно, для
разных точек параллаксы могут различаться как по знаку, так и по величине. Мы
взяли равные отрицательный и положительный параллаксы, чтобы наглядно показать,
что при этом воспринимаемая глубина за плоскостью всегда несколько больше, чем глубина
изображения перед плоскостью.
Пример. B
= 65мм; L = 400мм; D = 8мм.
Zm
= 8 x 400 / ( 65 + 8 ) =
43.8мм; Zp
= 8 x 400 / ( 65 – 8) =
56.1мм
Обратите внимание, что ни один из приведенных параметров не имеет
жесткой привязки к трехмерному изображению ( в том числе и параллакс, который зависит от масштаба линейно, а глубина при этом изменяется нелинейно,
вызывая нарушение пропорций трехмерного изображения). Стало быть, вычисленные значения
глубины ( которая названа здесь воспринимаемой
глубиной) имеют место только при полном совпадении всех параметров
просмотра. Однако, это вовсе не
означает, что воспринимаемая глубина, это нечто субъективное. Конечно, человек
не очень хорошо умеет измерять глубину "на глаз", но он хорошо ощущает
пропорции предметов, и основное назначение приведенных формул в том, чтобы
правильно рассчитать эти пропорции для
рекомендованных условий просмотра.
Легко заметить, что формулы (1), это, на
самом деле, одна формула :
Z = D x
L / ( B – D ), где Z и D – числа со знаками.
( 2 )
Мы разделили ее на
две только для того, чтобы с этими знаками не запутаться.
Для вычисления
параллакса по требуемой глубине можно воспользоваться обратной формулой:
D = B x Z / ( L + Z )
( 3 )
На рисунке показан
график зависимости параллакса от глубины для L = 320мм и B = 65мм.
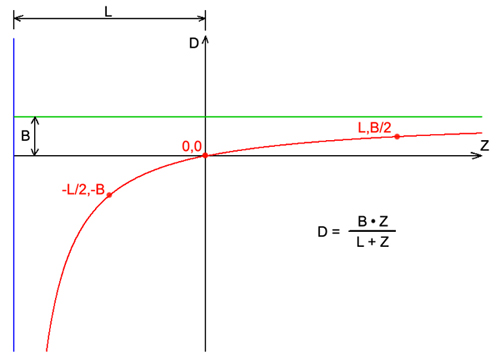
Внимательно посмотрим
на график. Очевидно, что точкам с нулевой глубиной (т.е. лежащим в формирующей
изображение плоскости) соответствует нулевой параллакс. Можно также заметить,
что при параллаксе, близком к +B, глубина Z стремится к
бесконечности, а получить отрицательную глубину равную дистанции просмотра
физически невозможно. Отметим еще две характерные точки: при положительном
параллаксе, равном половине межзрачкового расстояния глубина будет равна
дистанции просмотра, а при отрицательном параллаксе равном межзрачковому
расстоянию – половине дистанции просмотра.
Параметры
стереосъемки и их связь с параметрами просмотра
Рассмотрим съемку
стереопары двумя фотоаппаратами, оптические оси объективов которых расположены
параллельно на базовом расстоянии Bs. Фокусное расстояние объективов F. Мы хотим определить
параллакс Ds
точки, удаленной от линз объективов на расстояние L.
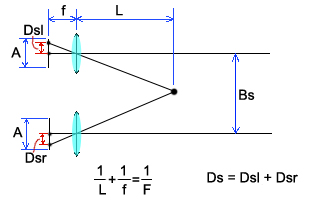
Параллакс Ds образуется
как сумма параллаксов Dsl и Dsr, возникающих в фокальных плоскостях левой и правой
фотокамеры. Для удобства вычисления,
расстояние до фокальной плоскости f заменено на фокусное расстояние объектива F подстановкой
из формулы линзы ( приведена на рисунке). В результате, формула приобрела
следующий вид:
Ds = Bs
x F / (L + F) (
4 )
Пример. Bs = 70мм; F = 50мм; L = 1500мм.
Ds
= 70 x 50 / ( 1500 + 50 ) =
2.26мм
Для того, чтобы
связать параметры съемки с параметрами просмотра, нас, в общем случае, будет
интересовать не абсолютная величина Ds, а ее отношение к ширине негатива A. При просмотре готового изображения с
горизонтальным размером A’, мы получим параллакс:
D = Ds x A’ / A ( 5 )
Пример. Ds = 2.26мм; A = 36мм (
стандартный негатив); A’ = 345мм (
монитор 17” )
D
= 2.26 x 345 / 36 = 21.6мм
Фокусные расстояния
объективов цифровых фотокамер указывают
в пересчете на 36мм пленку (эквивалентное фокусное расстояние), поэтому,
независимо от типа фотоаппарата ( цифровые матрицы, на самом деле, имеют гораздо
меньшие размеры, чем стандартный негатив), мы можем принять A = 36мм для
горизонтального расположения кадра и A = 24мм для
вертикального.
Многоракурсное изображение как
стабилизатор глубины
Как известно,
многоракурсное изображение (например, формируемое линзовым растром) состоит из
некоторого числа изображений (ракурсов), любые два из которых составляют
стереопару. Какую именно стереопару видит конкретный наблюдатель, зависит от
его положения относительно формирующей изображение плоскости. На рисунке
схематично показано N-ракурсное изображение красной точки, формируемое линзовым
растром ( продольные линии – условные границы ракурсов), и N наблюдателей
с одинаковым межзрачковым расстоянием B, расположившихся на
«критических дистанциях» пространства наблюдения, на которых в B
«укладывается» целое число ракурсов.
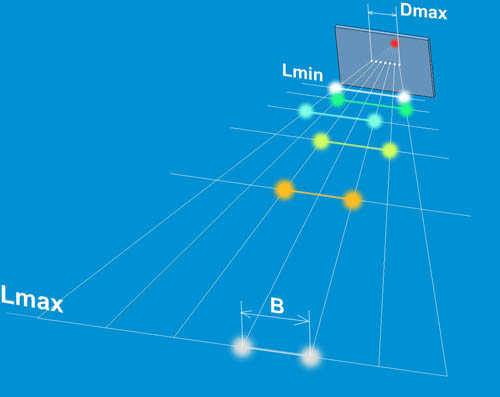
Дистанцию, на которой
ширина одного ракурса равна B, назовем максимальной дистанцией Lmax.
Конечно, стереоизображение можно увидеть и за этой чертой, но это зона негарантированного стереоизображения,
поскольку ширина одного ракурса превышает B и оба глаза могут
видеть один и тот же ракурс, т.е. плоское изображение. На минимальной дистанции
Lmin ширина N ракурсов
равна B.
Этой ширине в плоскости растра соответствует параллакс Dmax
( параметр, который достаточно легко измерить на «живом» растровом
изображении). Перемещаясь внутри зоны между двумя критическими чертами,
наблюдатель всегда видит два ракурса с постоянным интервалом. Например, в зоне
от Lmax в сторону растра это два соседних ракурса, в следующей зоне
– ракурсы через один и т.д. Соответственно, постоянным остается для каждой зоны
и параллакс D
равный 1/N,
2/N … N/N части Dmax. Для растра с углом
обзора a
максимальная и минимальная дистанция вычисляется по формулам:
Lmax = N x B / ( 2 x tg ( a / 2 )
); Lmin = B / ( 2 x tg ( a
/ 2 ) ) ( 6 )
Следует заметить, что
Lmax и Lmin отсчитываются от красной точки, а не от поверхности растра,
т.е. включают в себя Zp, однако, из-за ограничений самого линзового растра, можно считать, что Zp намного меньше Lmax.
Ниже приведены три
графика зависимости воспринимаемой глубины от дистанции просмотра для растра с
углом обзора 30° и разного количества формируемых ракурсов. Очевидно, что Lmin не
зависит от количества ракурсов и равна примерно 121мм ( для B = 65мм ), а
значения Lmax указаны на графиках. Зеленой линией обозначена расчетная
глубина:
Zp = Dmax x Lmax
/ ( B x N – Dmax ) ( 7 )
Две синие линии
соответствуют отклонению Zp +10% и +100%.
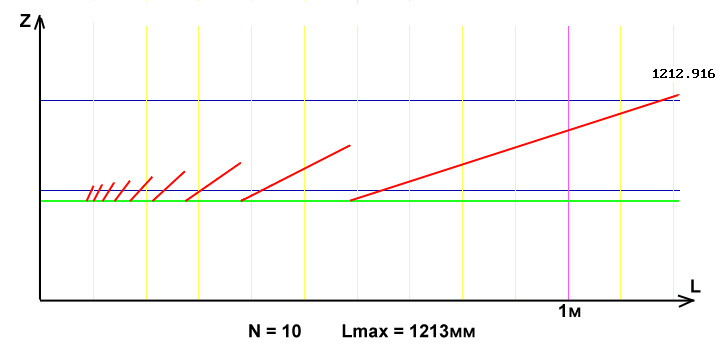
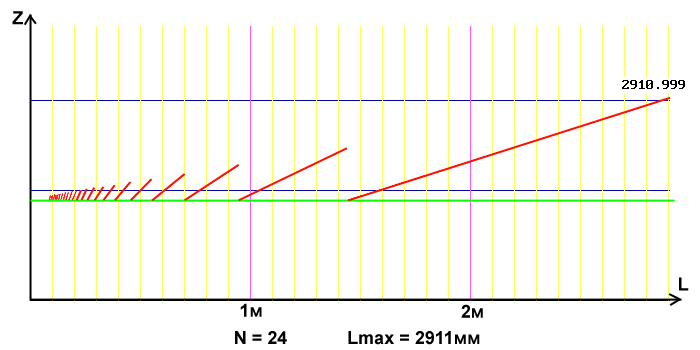
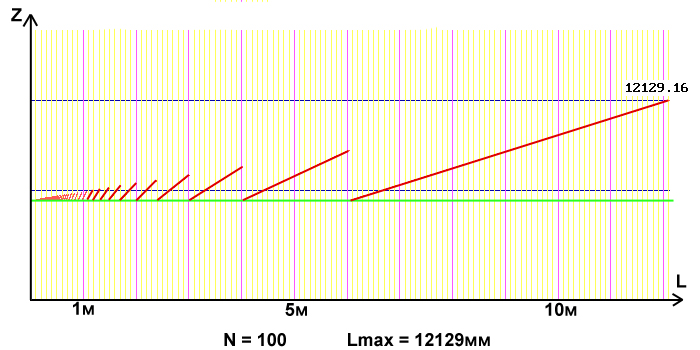
Что полезного можно
увидеть на этих графиках?
Во-первых,
что внутри каждой зоны между двумя критическими дистанциями многоракурсное
изображение ведет себя так же, как обычное стереоизображение: при увеличении
дистанции просмотра воспринимаемая глубина пропорционально увеличивается от расчетной до некоторой максимальной
величины. Однако, если продолжать увеличивать дистанцию, на границе зоны
произойдет скачкообразный возврат воспринимаемой глубины к расчетной и весь
процесс повторится, но с большим
размахом. Можно предположить, что именно скачкам глубины, а не переходам между
ракурсами мы обязаны неприятной «скачкообразностью» изображений с недостаточным
числом ракурсов.
Во-вторых, чем больше ракурсов имеет
изображение, тем больше диапазон
дистанций просмотра, при которых глубина с хорошей точностью соответствует
расчетной. А это означает, что объемное изображение перестает быть виртуальным
и приближается по своим свойствам к реальному.
С. Книгин, Челябинск, ноябрь 2006г
